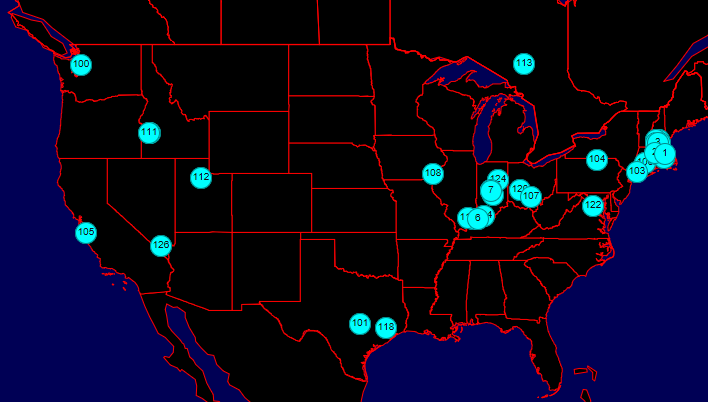
MADAR Screen
See LIVE at madar.site
Updated 9 April 2018
PURPOSE & SCOPE
A network of devices that are known to be very
sensitive and reliable for the betrayal of the
presence of some Unidentified Aerial Phenomena.
WHO IS BEHIND MADAR?
The beginnings of the MADAR Project began with Fran
Ridge in 1960 but the idea for MADAR-III came about in
April of 2016. Work on the new Project began in
September.
MADAR-III
The idea to build a newer, smaller, and deployable
system came about in early 2016. Others had been working
on such an idea but were having technical issues. By
April of 2016 Fran Ridge had put out a status
report to the MADAR Team mentioning a system that was
already being used extensively in the U. S. and other
parts of the world for radiation that could be devised
and used to log and store geomagnetic and
electromagnetic information. Data could be stored in a
database and displayed on a Map. Within months a
working model was created and about a dozen devices were
online.
WHAT WILL MADAR-III DO?
A small and affordable sensor system and processor
will be in place at many locations in the U.S. and
other parts of the world. A hundred such DataProbes
are planned by end of 2018. These devices
transmit data to a dedicated server and without the
need for a computer, although a pc offers many
advantages. The primary purpose of the MADAR-III
DataProbe is to detect a change in the local
geomagnetic field and display live readings on a Map
or "MADAR Screen" and alert the operator. A beginning
threshold (referred to as "limits") set by the
electronics engineers that can then be adjusted by the
operator based on the local geomagnetic field
signature, determines the sensitivity or when the
system will be triggered.
LATEST TECHNOLOGY:
-
The device will read
and store 24/7 the actual compass deflections,
detect a change in the ambient reading in
milligaus, and activate the system. On the MADAR
Screen the device icon goes into a "red" alert
status.
-
The sensor module will
also display and record ambient and anomalistic
BMP or Barometric Pressure.
-
All data is stored on
the MADAR server and time-stamped in UTC
(Universal Time Code).
-
If desired, at the
instrumentation site, a modified device can
activate a mode control panel (MCP) or power strip
which powers up other devices, all depending on
the level chosen by the operator. (All models may
soon have this feature built in).
-
Upon alert status the
device sends out an email alert message. Soon, the
text message will also go out and received via
cell phone. The designated operator fills out an
application upon startup, which can be modified at
any time by said operator.
-
Upon alert, the
operator can take a special kit to a nearby
observation point. *
SOURCES / INTEL ON SIGHTINGS
In the event that a UAP sighting takes place in the
region, the operator/team may be able to provide
interesting data in the form of slight changes just
under the triggering threshold. We already have several
sources for the latest sightings to use as support data
and leads for further investigation:
-
The National UFO
Reporting Center in Seattle, Washington
-
Mutual UFO Network
ANALYZING THE DATA
By going to the MADAR website, the operator can go
into the data from his MADAR Node and look at the one
minute datalines before and after an event. These are
what we refer to as the background readings for
geomagnetic field in degrees of heading, milligaus
readings and normal barometruic pressure. During an
alert things begin to move at a quicker pace, in
fact 60x's faster.
SAMPLE RATES
The sensor looks at the data 15 times a second but
logs data routinely at 60 sec intervals. DURING an
event the data flow goes into high gear and is stepped
up to the one second rate. So you have "status" lines
every minute, then "alert start" with alert lines
every second, then followed by "alert end" and the one
minute status resumes. The time calculated between the
"alert start" and the "alert end" is the event
duration. The magnitude is based on the degree of
swing of heading and/or milligaus readings.
BASE UNITS
For the operation of the MADAR System it is desired
that most units/devices would be utilized as Base
Units. These “robot” devices would receive and gather
data at all times and without the need for an on-site
operator.
FIELD UNITS
Field Units (and possibly “mobile” units) would be
built in the same manner but their use would be
different. Such a modified device could be made to be
used for Field use which could have a display of its
own and a battery pack, but it could also be placed at
the base location for the bulk of the time and
operated as a Base Unit.
WHAT CAN BE GATHERED
-
Detection - The module
provides baseline and anomalistic EME data in
milligaus and is the detection source.
-
Datalogging - There
are at least 150 documented incidents of compass
needle/UFO incidents (Herr/Ridge). The module we
selected has several sensors built in and is
well-suited for this operation and gives baseline
and anomalistic readings of azimuth.
-
BMP - Baseline and anomalistic Barometric
Pressure measurements would be valuable IF any
correlations were noted. Up until now there has
been little precedent since the witness(es) in
past events have little if any notification being
possible. But recent data searches have turned up
numerous potential BMP correlations.
-
Event Time is provided
with a Universal Time Code stamp.
-
Duration is calculated
from alert start to alert end.
-
Magnetude is based on
swing of EM data.
SUGGESTED SKYWATCH OR RAPID DEPLOYMENT KIT
Binoculars
Cell phone and important numbers to call
Flashlight
Strobe Light (for signalling UAP)
Compass
K-II type meter
Voice Recorder
Video or body camera
Polarized sun glasses (for observation of possible
"Faraday rings")
Notepad and Pens
Laptop with FlightRadar24
MADAR
CONTROL CENTER
Attn: Fran Ridge
5847 River Walk Circle
Newburgh, Indiana 47630
(812) 490-0094
skyking42@gmx.com
franridge42@gmail.com

